Banc de relevé pour arbre à cames (MAJ/042020 FIN DE PAGE 1)
MessagePosté :01 juin 2018 22:12
Bonjour.
Je sors un peu des cloux du monde des gestions moteur mais sans trop m'éloigné non plus , car sur le fond certaines parties sont intéressante pour comprendre ce quil se passe dans un boitier de gestion moteur ...
L'idée me trotté dans la tête depuis longtemps : automatiser la fastidieuse tache de contrôle des profils d'arbre a came.
jusqu'a présent je faisait cela de façon empirique: un disque gradué de grand diamétre, un comparateur ,une feuille et un stylo ou je noté degré/degré la levée de came.. souvent 2 à 3h de boulot ... :sleep:
je me lance donc dans la fabrication d'un banc ou l'on posera l'AAC, on appui sur "marche" et le logiciel nous sort les courbes
cela va passer par l'utilisation :
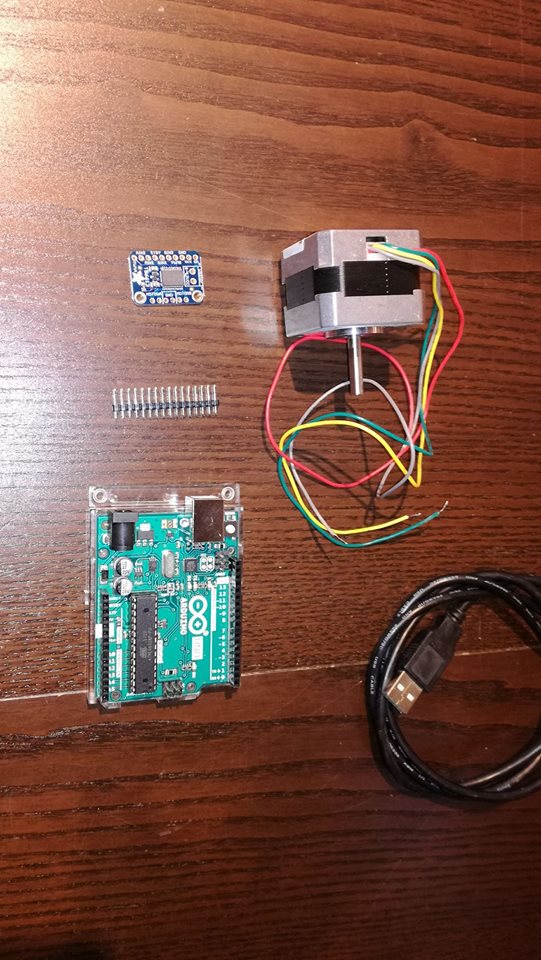
>d'une carte Arduino UNO,
> d'un moteur pas a pas ( pour la rotation automatique de l'AAC)
>D'un codeur rotatif ( pour la position angulaire )
>de 2 capteurs lineaires ( pour la mesure de levée de came adm et ech )
>d'un peu d'électronique pour reussir a avoir des mesure precise et fiable.
>et d'un logiciel pour gérer tout ce petit monde ( en réalité pour le moment 2 : l'IDE d'arduino + Excel pour les enregsitrements/ tracé des courbes).
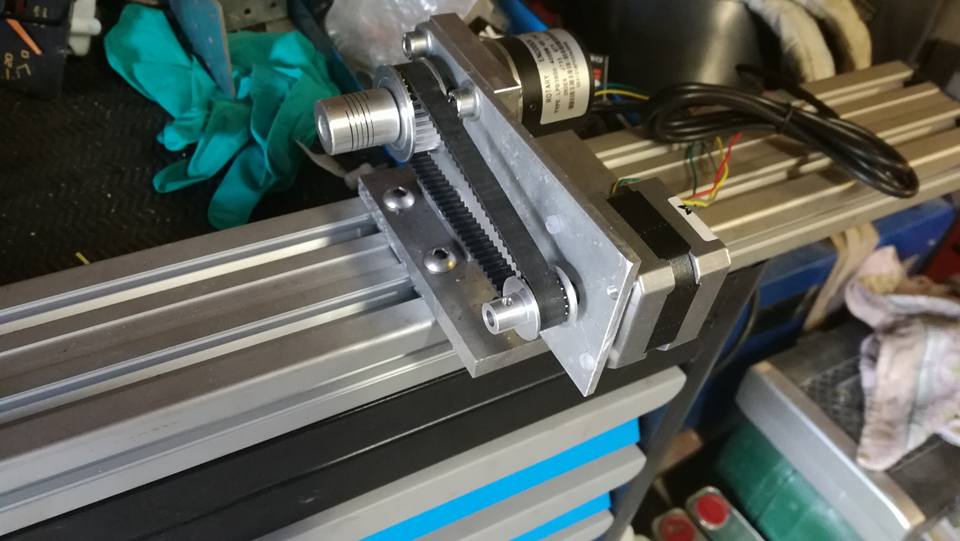
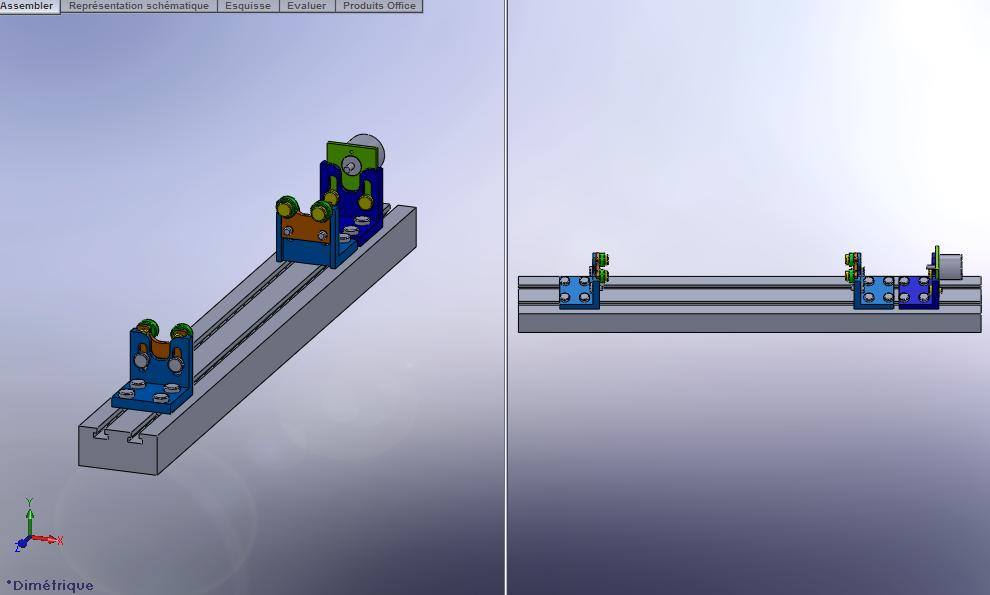
Pour la partie mécanique
Le chassis sera un rail de guidage alu .
La partie support codeur/ moteur/ transmission sera usiné
L'arbre a came sera posé sur 2 "Vé" réglable à roulement à billes. ( et non pas pris entre pointe dans un mandrin comme on peu le voir sur certain banc du commerce , c'est une abération...)
Les capteurs linéaire seront aussi fixé sur des rail de guidage alu sur l'arrière du chassis.
Avec 100cm d'envergure et une capacité de 100mm de diamètre , je pourai passé a peut pres tous les arbres a cames du marché
J'ai reçu bien sur de l'aide pour la partie électronique , mais étant autodidacte j'ai également beaucoup apris de moi meme .
J'aime beaucoup le monde Arduino qui est a l'image de Megasquirt : ouvert !!! On trouve tous ce que l'on veut sur le net et en montrant de la volonté les gens partage leur savoir aussi bien qu'ici
La partie transmission est opérationnelle et le programme également .
Actuellement j'utilise l'alimentation de l'Arduino pour alimenter le capteur lineaire , le codeur et le driver du moteur pas a pas , une alimentation 12vcc externe pour le moteur pas a pas et également le CAN interne de ARDUINO pour recupérer la valeur du capteur linéeaire.
Mais les essais montre que la stabilité électrique de l'alimentation arduino n'est pas assez précise et que cela influe beaucoup sur les relevés.
Je vais donc utilisé un module de tension de référence 5v externe , qui sera alimenté par une pile 9v. En effet la pile reste la soltuion la plus stable niveau tension avec une variation de 1mV maxi. Les essais fais avec des alimentations 0/30Vcc de laboratoire montre des variations jusqua 5/6mV ( au meme titre que celle que l'on relève sur le +5v de l'Arduino).
A cela je vais également rajouner un module CAN16bits externe au lieu d'utiliser le CAN10bit interne.
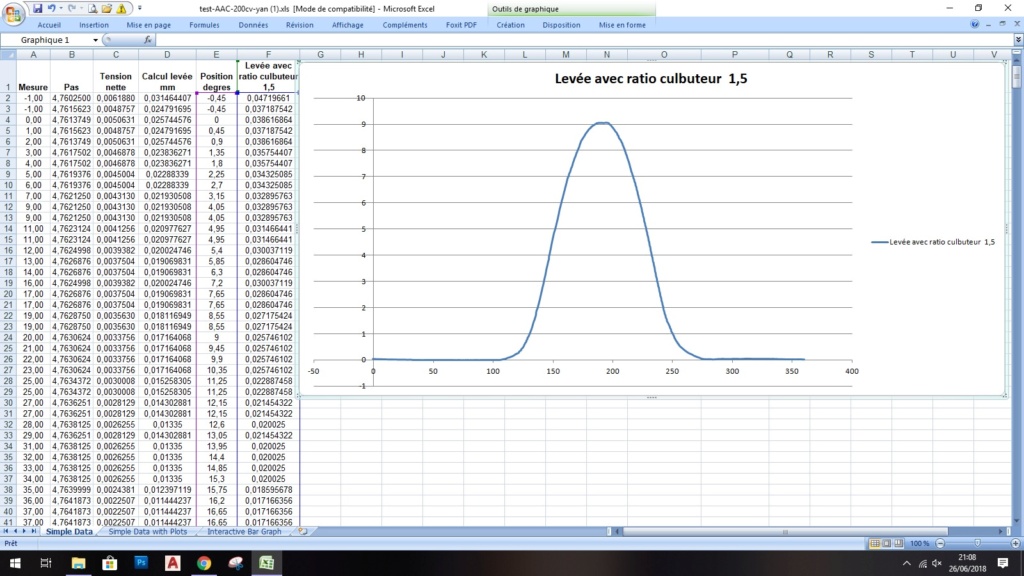
La précision de la levée est pour le moment a 0.02mm ce qui n'est pas mal mais le convertisseur analogique /numérique interne de l'arduino est seulement 10bit soit 1023 points pour la course du capteur ( 25mm) .
On va faire mieu avec le nouveau convertisseur Analogique /Numérique en 16bit en passant de 1023 points à ... 32767 points
. Bon ok la c'est dans l'excés niveau précision ( 25/32767 = 0.00076mm )mais au moin on sera pas bridé par ceci!!!
Je dois encore finir les supports Vé AAC, et du 1ercapteur linéair pour passer au essai avec un Arbre a came en place. La on est encore en mode proto ,mais ça fonctionne.
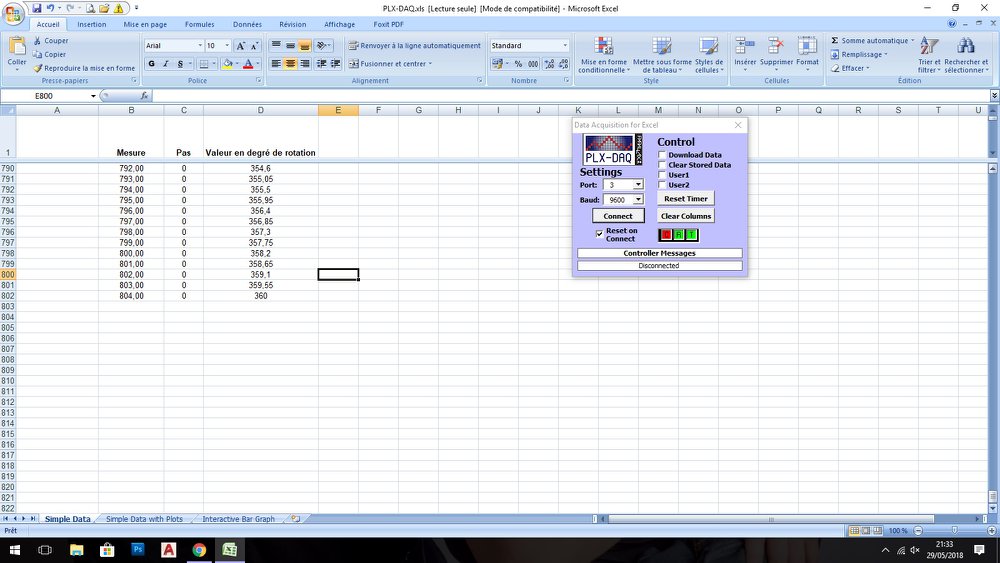
Actuellement on a un relevé de 800 points pour 1 tour d'arbre a came soit une mesure de la levée tout les 0.45° mdr3 .





Je sors un peu des cloux du monde des gestions moteur mais sans trop m'éloigné non plus , car sur le fond certaines parties sont intéressante pour comprendre ce quil se passe dans un boitier de gestion moteur ...
L'idée me trotté dans la tête depuis longtemps : automatiser la fastidieuse tache de contrôle des profils d'arbre a came.
jusqu'a présent je faisait cela de façon empirique: un disque gradué de grand diamétre, un comparateur ,une feuille et un stylo ou je noté degré/degré la levée de came.. souvent 2 à 3h de boulot ... :sleep:
je me lance donc dans la fabrication d'un banc ou l'on posera l'AAC, on appui sur "marche" et le logiciel nous sort les courbes
cela va passer par l'utilisation :
>d'une carte Arduino UNO,
> d'un moteur pas a pas ( pour la rotation automatique de l'AAC)
>D'un codeur rotatif ( pour la position angulaire )
>de 2 capteurs lineaires ( pour la mesure de levée de came adm et ech )
>d'un peu d'électronique pour reussir a avoir des mesure precise et fiable.
>et d'un logiciel pour gérer tout ce petit monde ( en réalité pour le moment 2 : l'IDE d'arduino + Excel pour les enregsitrements/ tracé des courbes).
Pour la partie mécanique
Le chassis sera un rail de guidage alu .
La partie support codeur/ moteur/ transmission sera usiné
L'arbre a came sera posé sur 2 "Vé" réglable à roulement à billes. ( et non pas pris entre pointe dans un mandrin comme on peu le voir sur certain banc du commerce , c'est une abération...)
Les capteurs linéaire seront aussi fixé sur des rail de guidage alu sur l'arrière du chassis.
Avec 100cm d'envergure et une capacité de 100mm de diamètre , je pourai passé a peut pres tous les arbres a cames du marché
J'ai reçu bien sur de l'aide pour la partie électronique , mais étant autodidacte j'ai également beaucoup apris de moi meme .
J'aime beaucoup le monde Arduino qui est a l'image de Megasquirt : ouvert !!! On trouve tous ce que l'on veut sur le net et en montrant de la volonté les gens partage leur savoir aussi bien qu'ici
La partie transmission est opérationnelle et le programme également .
Actuellement j'utilise l'alimentation de l'Arduino pour alimenter le capteur lineaire , le codeur et le driver du moteur pas a pas , une alimentation 12vcc externe pour le moteur pas a pas et également le CAN interne de ARDUINO pour recupérer la valeur du capteur linéeaire.
Mais les essais montre que la stabilité électrique de l'alimentation arduino n'est pas assez précise et que cela influe beaucoup sur les relevés.
Je vais donc utilisé un module de tension de référence 5v externe , qui sera alimenté par une pile 9v. En effet la pile reste la soltuion la plus stable niveau tension avec une variation de 1mV maxi. Les essais fais avec des alimentations 0/30Vcc de laboratoire montre des variations jusqua 5/6mV ( au meme titre que celle que l'on relève sur le +5v de l'Arduino).
A cela je vais également rajouner un module CAN16bits externe au lieu d'utiliser le CAN10bit interne.
La précision de la levée est pour le moment a 0.02mm ce qui n'est pas mal mais le convertisseur analogique /numérique interne de l'arduino est seulement 10bit soit 1023 points pour la course du capteur ( 25mm) .
On va faire mieu avec le nouveau convertisseur Analogique /Numérique en 16bit en passant de 1023 points à ... 32767 points
. Bon ok la c'est dans l'excés niveau précision ( 25/32767 = 0.00076mm )mais au moin on sera pas bridé par ceci!!!
Je dois encore finir les supports Vé AAC, et du 1ercapteur linéair pour passer au essai avec un Arbre a came en place. La on est encore en mode proto ,mais ça fonctionne.
Actuellement on a un relevé de 800 points pour 1 tour d'arbre a came soit une mesure de la levée tout les 0.45° mdr3 .